|
JSBSim Flight Dynamics Model
1.0 (02 March 2017)
An Open Source Flight Dynamics and Control Software Library in C++
|
|
JSBSim Flight Dynamics Model
1.0 (02 March 2017)
An Open Source Flight Dynamics and Control Software Library in C++
|
Encapsulates a Sensor component for the flight control system. More...
#include <FGSensor.h>
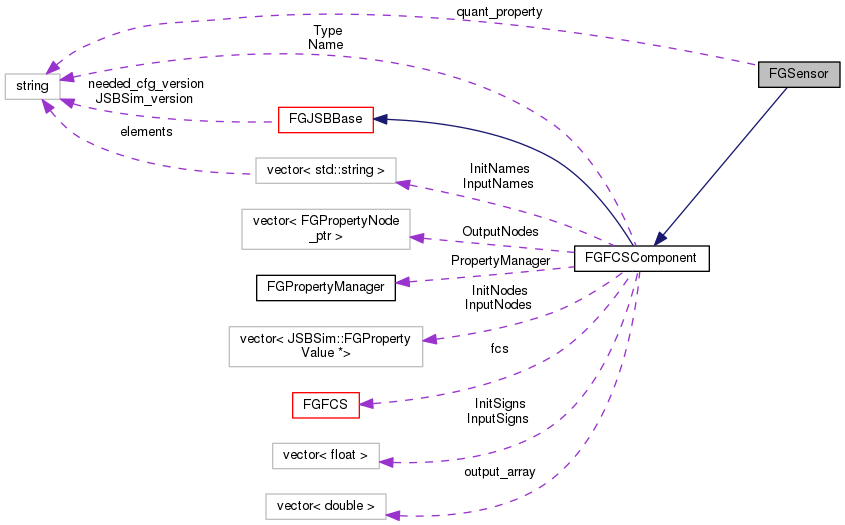
 Inheritance diagram for FGSensor: Collaboration diagram for FGSensor:
Inheritance diagram for FGSensor: Collaboration diagram for FGSensor:Public Member Functions | |
| FGSensor (FGFCS *fcs, Element *element) | |
| double | GetFailHigh (void) const |
| double | GetFailLow (void) const |
| double | GetFailStuck (void) const |
| int | GetQuantized (void) const |
| void | ResetPastStates (void) |
| virtual bool | Run (void) |
| void | SetFailHigh (double val) |
| void | SetFailLow (double val) |
| void | SetFailStuck (double val) |
| Public Member Functions inherited from FGFCSComponent | |
| FGFCSComponent (FGFCS *fcs, Element *el) | |
| Constructor. | |
| virtual | ~FGFCSComponent () |
| Destructor. | |
| std::string | GetName (void) const |
| double | GetOutput (void) const |
| virtual double | GetOutputPct (void) const |
| std::string | GetType (void) const |
| void | SetDtForFrameCount (int FrameCount) |
| virtual void | SetOutput (void) |
| Public Member Functions inherited from FGJSBBase | |
| FGJSBBase () | |
| Constructor for FGJSBBase. | |
| virtual | ~FGJSBBase () |
| Destructor for FGJSBBase. | |
| void | disableHighLighting (void) |
| Disables highlighting in the console output. | |
| std::string | GetVersion (void) |
| Returns the version number of JSBSim. More... | |
| void | PutMessage (const Message &msg) |
| Places a Message structure on the Message queue. More... | |
| void | PutMessage (const std::string &text) |
| Creates a message with the given text and places it on the queue. More... | |
| void | PutMessage (const std::string &text, bool bVal) |
| Creates a message with the given text and boolean value and places it on the queue. More... | |
| void | PutMessage (const std::string &text, int iVal) |
| Creates a message with the given text and integer value and places it on the queue. More... | |
| void | PutMessage (const std::string &text, double dVal) |
| Creates a message with the given text and double value and places it on the queue. More... | |
| int | SomeMessages (void) |
| Reads the message on the queue (but does not delete it). More... | |
| void | ProcessMessage (void) |
| Reads the message on the queue and removes it from the queue. More... | |
| Message * | ProcessNextMessage (void) |
| Reads the next message on the queue and removes it from the queue. More... | |
Protected Types | |
| enum | eDistributionType { eUniform =0, eGaussian } |
| enum | eNoiseType { ePercent =0, eAbsolute } |
Protected Member Functions | |
| void | Bias (void) |
| void | bind (void) |
| void | Drift (void) |
| void | Gain (void) |
| void | Lag (void) |
| void | Noise (void) |
| void | ProcessSensorSignal (void) |
| void | Quantize (void) |
| Protected Member Functions inherited from FGFCSComponent | |
| void | Clip (void) |
| void | Delay (void) |
| Protected Member Functions inherited from FGJSBBase | |
| void | Debug (int) |
Protected Attributes | |
| double | bias |
| int | bits |
| double | ca |
| double | cb |
| lag filter coefficient "a" | |
| enum JSBSim::FGSensor::eDistributionType | DistributionType |
| int | divisions |
| double | drift |
| double | drift_rate |
| bool | fail_high |
| bool | fail_low |
| bool | fail_stuck |
| double | gain |
| double | granularity |
| double | lag |
| double | max |
| double | min |
| int | noise_type |
| double | noise_variance |
| enum JSBSim::FGSensor::eNoiseType | NoiseType |
| double | PreviousInput |
| double | PreviousOutput |
| lag filter coefficient "b" | |
| std::string | quant_property |
| int | quantized |
| double | span |
| Protected Attributes inherited from FGFCSComponent | |
| bool | clip |
| double | clipmax |
| FGPropertyNode_ptr | ClipMaxPropertyNode |
| float | clipMaxSign |
| double | clipmin |
| FGPropertyNode_ptr | ClipMinPropertyNode |
| float | clipMinSign |
| unsigned int | delay |
| double | delay_time |
| double | dt |
| FGFCS * | fcs |
| int | index |
| std::vector< std::string > | InitNames |
| std::vector< FGPropertyValue * > | InitNodes |
| std::vector< float > | InitSigns |
| double | Input |
| std::vector< std::string > | InputNames |
| std::vector< FGPropertyValue * > | InputNodes |
| std::vector< float > | InputSigns |
| bool | IsOutput |
| std::string | Name |
| double | Output |
| std::vector< double > | output_array |
| std::vector< FGPropertyNode_ptr > | OutputNodes |
| FGPropertyManager * | PropertyManager |
| FGPropertyNode_ptr | treenode |
| std::string | Type |
Additional Inherited Members | |
| Public Types inherited from FGJSBBase | |
| enum | { eL = 1, eM, eN } |
| Moments L, M, N. | |
| enum | { eP = 1, eQ, eR } |
| Rates P, Q, R. | |
| enum | { eU = 1, eV, eW } |
| Velocities U, V, W. | |
| enum | { eX = 1, eY, eZ } |
| Positions X, Y, Z. | |
| enum | { ePhi = 1, eTht, ePsi } |
| Euler angles Phi, Theta, Psi. | |
| enum | { eDrag = 1, eSide, eLift } |
| Stability axis forces, Drag, Side force, Lift. | |
| enum | { eRoll = 1, ePitch, eYaw } |
| Local frame orientation Roll, Pitch, Yaw. | |
| enum | { eNorth = 1, eEast, eDown } |
| Local frame position North, East, Down. | |
| enum | { eLat = 1, eLong, eRad } |
| Locations Radius, Latitude, Longitude. | |
| enum | { inNone = 0, inDegrees, inRadians, inMeters, inFeet } |
| Conversion specifiers. | |
| Static Public Member Functions inherited from FGJSBBase | |
| static double | CelsiusToFahrenheit (double celsius) |
| Converts from degrees Celsius to degrees Fahrenheit. More... | |
| static double | CelsiusToKelvin (double celsius) |
| Converts from degrees Celsius to degrees Kelvin. More... | |
| static double | CelsiusToRankine (double celsius) |
| Converts from degrees Celsius to degrees Rankine. More... | |
| static double | Constrain (double min, double value, double max) |
| Constrain a value between a minimum and a maximum value. | |
| static bool | EqualToRoundoff (double a, double b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (float a, float b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (float a, double b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (double a, float b) |
| Finite precision comparison. More... | |
| static double | FahrenheitToCelsius (double fahrenheit) |
| Converts from degrees Fahrenheit to degrees Celsius. More... | |
| static double | FeetToMeters (double measure) |
| Converts from feet to meters. More... | |
| static double | GaussianRandomNumber (void) |
| static double | KelvinToCelsius (double kelvin) |
| Converts from degrees Kelvin to degrees Celsius. More... | |
| static double | KelvinToFahrenheit (double kelvin) |
| Converts from degrees Kelvin to degrees Fahrenheit. More... | |
| static double | KelvinToRankine (double kelvin) |
| Converts from degrees Kelvin to degrees Rankine. More... | |
| static double | MachFromVcalibrated (double vcas, double p, double psl, double rhosl) |
| Calculate the Mach number from the calibrated airspeed. More... | |
| static double | PitotTotalPressure (double mach, double p) |
| Compute the total pressure in front of the Pitot tube. More... | |
| static double | RankineToCelsius (double rankine) |
| Converts from degrees Rankine to degrees Celsius. More... | |
| static double | RankineToKelvin (double rankine) |
| Converts from degrees Rankine to degrees Kelvin. More... | |
| static double | sign (double num) |
| static double | VcalibratedFromMach (double mach, double p, double psl, double rhosl) |
| Calculate the calibrated airspeed from the Mach number. More... | |
| Static Public Attributes inherited from FGJSBBase | |
| static short | debug_lvl = 1 |
| static char | highint [5] = {27, '[', '1', 'm', '\0' } |
| highlights text | |
| static char | halfint [5] = {27, '[', '2', 'm', '\0' } |
| low intensity text | |
| static char | normint [6] = {27, '[', '2', '2', 'm', '\0' } |
| normal intensity text | |
| static char | reset [5] = {27, '[', '0', 'm', '\0' } |
| resets text properties | |
| static char | underon [5] = {27, '[', '4', 'm', '\0' } |
| underlines text | |
| static char | underoff [6] = {27, '[', '2', '4', 'm', '\0' } |
| underline off | |
| static char | fgblue [6] = {27, '[', '3', '4', 'm', '\0' } |
| blue text | |
| static char | fgcyan [6] = {27, '[', '3', '6', 'm', '\0' } |
| cyan text | |
| static char | fgred [6] = {27, '[', '3', '1', 'm', '\0' } |
| red text | |
| static char | fggreen [6] = {27, '[', '3', '2', 'm', '\0' } |
| green text | |
| static char | fgdef [6] = {27, '[', '3', '9', 'm', '\0' } |
| default text | |
| Static Protected Member Functions inherited from FGJSBBase | |
| static std::string | CreateIndexedPropertyName (const std::string &Property, int index) |
| Static Protected Attributes inherited from FGJSBBase | |
| static const double | degtorad = 0.017453292519943295769236907684886 |
| static const double | fpstokts = 1.0/ktstofps |
| static const double | fttom = 0.3048 |
| static int | gaussian_random_number_phase = 0 |
| static const double | hptoftlbssec = 550.0 |
| static const double | in3tom3 = 1.638706E-5 |
| static const double | inchtoft = 0.08333333 |
| static const double | inhgtopa = 3386.38 |
| static const std::string | JSBSim_version = "1.0 " __DATE__ " " __TIME__ |
| static const double | kgtolb = 2.20462 |
| static const double | kgtoslug = 0.06852168 |
| static const double | ktstofps = 1.68781 |
| static const double | lbtoslug = 1.0/slugtolb |
| static Message | localMsg |
| static const double | m3toft3 = 1.0/(fttom*fttom*fttom) |
| static double | Mair = 28.9645 |
| static unsigned int | messageId = 0 |
| static std::queue< Message > | Messages |
| static const std::string | needed_cfg_version = "2.0" |
| static const double | psftoinhg = 0.014138 |
| static const double | psftopa = 47.88 |
| static const double | radtodeg = 57.295779513082320876798154814105 |
| static double | Reng = 1716.56 |
| static double | Rstar = 1545.348 |
| static const double | SHRatio = 1.40 |
| static const double | slugtolb = 32.174049 |
Encapsulates a Sensor component for the flight control system.
Syntax:
Example:
The only required element in the sensor definition is the input element. In that case, no degradation would be modeled, and the output would simply be the input.
Noise can be Gaussian or uniform, and the noise can be applied as a factor (PERCENT) or additively (ABSOLUTE). The noise that can be applied at each frame of the simulation execution is calculated as a random factor times a noise value that is specified in the config file. When the noise distribution type is Gaussian, the random number can be between roughly -3 and +3 for a span of six sigma. When the distribution type is UNIFORM, the random value can be between -1.0 and +1.0. This random value is multiplied against the specified noise to arrive at a random noise value for the frame. If the noise type is PERCENT, then random noise value is added to one, and that sum is then multiplied against the input signal for the sensor. In this case, the specified noise value in the config file would be expected to actually be a percent value, such as 0.05 (for a 5% variance). If the noise type is ABSOLUTE, then the random noise value specified in the config file is understood to be an absolute value of noise to be added to the input signal instead of being added to 1.0 and having that sum be multiplied against the input signal as in the PERCENT type. For the ABSOLUTE noise case, the noise number specified in the config file could be any number.
If the type is ABSOLUTE, then the noise number times the random number is added to the input signal instead of being multiplied against it as with the PERCENT type of noise.
The delay element can specify a frame delay. The integer number provided is the number of frames to delay the output signal.
Definition at line 134 of file FGSensor.h.
 1.8.13
1.8.13