|
JSBSim Flight Dynamics Model
1.0 (02 March 2017)
An Open Source Flight Dynamics and Control Software Library in C++
|
|
JSBSim Flight Dynamics Model
1.0 (02 March 2017)
An Open Source Flight Dynamics and Control Software Library in C++
|
Models a helicopter rotor. More...
#include <FGRotor.h>
 Inheritance diagram for FGRotor: Collaboration diagram for FGRotor:
Inheritance diagram for FGRotor: Collaboration diagram for FGRotor:Public Member Functions | |
| FGRotor (FGFDMExec *exec, Element *rotor_element, int num) | |
| Constructor for FGRotor. More... | |
| ~FGRotor () | |
| Destructor for FGRotor. | |
| double | Calculate (double EnginePower) |
| Returns the scalar thrust of the rotor, and adjusts the RPM value. | |
| double | GetA0 (void) const |
| Retrieves the rotor's coning angle. | |
| double | GetA1 (void) const |
| Retrieves the longitudinal flapping angle with respect to the rotor shaft. | |
| double | GetB1 (void) const |
| Retrieves the lateral flapping angle with respect to the rotor shaft. | |
| double | GetCollectiveCtrl (void) const |
| Retrieves the collective control input in radians. | |
| double | GetCT (void) const |
| Retrieves the thrust coefficient. | |
| double | GetEngineRPM (void) const |
| Retrieves the RPMs of the Engine, as seen from this rotor. | |
| double | GetGearRatio (void) |
| Tells the rotor's gear ratio, usually the engine asks for this. | |
| double | GetGroundEffectScaleNorm (void) const |
| Retrieves the ground effect scaling factor. | |
| double | GetLambda (void) const |
| Retrieves the inflow ratio. | |
| double | GetLateralCtrl (void) const |
| Retrieves the lateral control input in radians. | |
| double | GetLongitudinalCtrl (void) const |
| Retrieves the longitudinal control input in radians. | |
| double | GetMu (void) const |
| Retrieves the tip-speed (aka advance) ratio. | |
| double | GetNu (void) const |
| Retrieves the induced inflow ratio. | |
| double | GetPhiDW (void) const |
| Downwash angle - positive values point leftward (given a horizontal spinning rotor) | |
| double | GetPowerRequired (void) const |
| Returns the power required by the rotor. | |
| double | GetRPM (void) const |
| Retrieves the RPMs of the rotor. | |
| double | GetThetaDW (void) const |
| Downwash angle - positive values point forward (given a horizontal spinning rotor) | |
| double | GetThrust (void) const |
| Retrieves the thrust of the rotor. | |
| std::string | GetThrusterLabels (int id, const std::string &delimeter) |
| std::string | GetThrusterValues (int id, const std::string &delimeter) |
| double | GetTorque (void) const |
| Retrieves the torque. | |
| double | GetVi (void) const |
| Retrieves the induced velocity. | |
| void | SetCollectiveCtrl (double c) |
| Sets the collective control input in radians. | |
| void | SetEngineRPM (double rpm) |
| void | SetGroundEffectScaleNorm (double g) |
| Sets the ground effect scaling factor. | |
| void | SetLateralCtrl (double c) |
| Sets the lateral control input in radians. | |
| void | SetLongitudinalCtrl (double c) |
| Sets the longitudinal control input in radians. | |
| void | SetRPM (double rpm) |
| Public Member Functions inherited from FGThruster | |
| FGThruster (FGFDMExec *FDMExec, Element *el, int num) | |
| Constructor. | |
| virtual | ~FGThruster () |
| Destructor. | |
| double | GetGearRatio (void) |
| std::string | GetName (void) |
| virtual double | GetPowerRequired (void) |
| double | GetReverserAngle (void) const |
| double | GetThrust (void) const |
| eType | GetType (void) |
| virtual void | ResetToIC (void) |
| void | SetName (std::string name) |
| void | SetReverserAngle (double angle) |
| Public Member Functions inherited from FGForce | |
| FGForce (FGFDMExec *FDMExec) | |
| Constructor. | |
| FGForce (const FGForce &force) | |
| ~FGForce () | |
| Destructor. | |
| const FGColumnVector3 & | GetActingLocation (void) const |
| double | GetActingLocationX (void) const |
| double | GetActingLocationY (void) const |
| double | GetActingLocationZ (void) const |
| const FGColumnVector3 & | GetAnglesToBody (void) const |
| double | GetAnglesToBody (int axis) const |
| virtual const FGColumnVector3 & | GetBodyForces (void) |
| double | GetBodyXForce (void) const |
| double | GetBodyYForce (void) const |
| double | GetBodyZForce (void) const |
| const FGColumnVector3 & | GetLocation (void) const |
| double | GetLocationX (void) const |
| double | GetLocationY (void) const |
| double | GetLocationZ (void) const |
| const FGColumnVector3 & | GetMoments (void) const |
| double | GetPitch (void) const |
| TransformType | GetTransformType (void) const |
| double | GetYaw (void) const |
| void | SetActingLocation (double x, double y, double z) |
| Acting point of application. More... | |
| void | SetActingLocation (const FGColumnVector3 &vv) |
| double | SetActingLocationX (double x) |
| double | SetActingLocationY (double y) |
| double | SetActingLocationZ (double z) |
| void | SetAnglesToBody (double broll, double bpitch, double byaw) |
| void | SetAnglesToBody (const FGColumnVector3 &vv) |
| void | SetLocation (double x, double y, double z) |
| void | SetLocation (const FGColumnVector3 &vv) |
| void | SetLocationX (double x) |
| void | SetLocationY (double y) |
| void | SetLocationZ (double z) |
| void | SetPitch (double pitch) |
| void | SetTransformType (TransformType ii) |
| void | SetYaw (double yaw) |
| const FGMatrix33 & | Transform (void) const |
| void | UpdateCustomTransformMatrix (void) |
| Public Member Functions inherited from FGJSBBase | |
| FGJSBBase () | |
| Constructor for FGJSBBase. | |
| virtual | ~FGJSBBase () |
| Destructor for FGJSBBase. | |
| void | disableHighLighting (void) |
| Disables highlighting in the console output. | |
| std::string | GetVersion (void) |
| Returns the version number of JSBSim. More... | |
| void | PutMessage (const Message &msg) |
| Places a Message structure on the Message queue. More... | |
| void | PutMessage (const std::string &text) |
| Creates a message with the given text and places it on the queue. More... | |
| void | PutMessage (const std::string &text, bool bVal) |
| Creates a message with the given text and boolean value and places it on the queue. More... | |
| void | PutMessage (const std::string &text, int iVal) |
| Creates a message with the given text and integer value and places it on the queue. More... | |
| void | PutMessage (const std::string &text, double dVal) |
| Creates a message with the given text and double value and places it on the queue. More... | |
| int | SomeMessages (void) |
| Reads the message on the queue (but does not delete it). More... | |
| void | ProcessMessage (void) |
| Reads the message on the queue and removes it from the queue. More... | |
| Message * | ProcessNextMessage (void) |
| Reads the next message on the queue and removes it from the queue. More... | |
Additional Inherited Members | |
| Public Types inherited from FGThruster | |
| enum | eType { ttNozzle, ttRotor, ttPropeller, ttDirect } |
| Public Types inherited from FGForce | |
| enum | TransformType { tNone, tWindBody, tLocalBody, tCustom } |
| Public Types inherited from FGJSBBase | |
| enum | { eL = 1, eM, eN } |
| Moments L, M, N. | |
| enum | { eP = 1, eQ, eR } |
| Rates P, Q, R. | |
| enum | { eU = 1, eV, eW } |
| Velocities U, V, W. | |
| enum | { eX = 1, eY, eZ } |
| Positions X, Y, Z. | |
| enum | { ePhi = 1, eTht, ePsi } |
| Euler angles Phi, Theta, Psi. | |
| enum | { eDrag = 1, eSide, eLift } |
| Stability axis forces, Drag, Side force, Lift. | |
| enum | { eRoll = 1, ePitch, eYaw } |
| Local frame orientation Roll, Pitch, Yaw. | |
| enum | { eNorth = 1, eEast, eDown } |
| Local frame position North, East, Down. | |
| enum | { eLat = 1, eLong, eRad } |
| Locations Radius, Latitude, Longitude. | |
| enum | { inNone = 0, inDegrees, inRadians, inMeters, inFeet } |
| Conversion specifiers. | |
| Static Public Member Functions inherited from FGJSBBase | |
| static double | CelsiusToFahrenheit (double celsius) |
| Converts from degrees Celsius to degrees Fahrenheit. More... | |
| static double | CelsiusToKelvin (double celsius) |
| Converts from degrees Celsius to degrees Kelvin. More... | |
| static double | CelsiusToRankine (double celsius) |
| Converts from degrees Celsius to degrees Rankine. More... | |
| static double | Constrain (double min, double value, double max) |
| Constrain a value between a minimum and a maximum value. | |
| static bool | EqualToRoundoff (double a, double b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (float a, float b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (float a, double b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (double a, float b) |
| Finite precision comparison. More... | |
| static double | FahrenheitToCelsius (double fahrenheit) |
| Converts from degrees Fahrenheit to degrees Celsius. More... | |
| static double | FeetToMeters (double measure) |
| Converts from feet to meters. More... | |
| static double | GaussianRandomNumber (void) |
| static double | KelvinToCelsius (double kelvin) |
| Converts from degrees Kelvin to degrees Celsius. More... | |
| static double | KelvinToFahrenheit (double kelvin) |
| Converts from degrees Kelvin to degrees Fahrenheit. More... | |
| static double | KelvinToRankine (double kelvin) |
| Converts from degrees Kelvin to degrees Rankine. More... | |
| static double | MachFromVcalibrated (double vcas, double p, double psl, double rhosl) |
| Calculate the Mach number from the calibrated airspeed. More... | |
| static double | PitotTotalPressure (double mach, double p) |
| Compute the total pressure in front of the Pitot tube. More... | |
| static double | RankineToCelsius (double rankine) |
| Converts from degrees Rankine to degrees Celsius. More... | |
| static double | RankineToKelvin (double rankine) |
| Converts from degrees Rankine to degrees Kelvin. More... | |
| static double | sign (double num) |
| static double | VcalibratedFromMach (double mach, double p, double psl, double rhosl) |
| Calculate the calibrated airspeed from the Mach number. More... | |
| Public Attributes inherited from FGThruster | |
| struct JSBSim::FGThruster::Inputs | in |
| Static Public Attributes inherited from FGJSBBase | |
| static short | debug_lvl = 1 |
| static char | highint [5] = {27, '[', '1', 'm', '\0' } |
| highlights text | |
| static char | halfint [5] = {27, '[', '2', 'm', '\0' } |
| low intensity text | |
| static char | normint [6] = {27, '[', '2', '2', 'm', '\0' } |
| normal intensity text | |
| static char | reset [5] = {27, '[', '0', 'm', '\0' } |
| resets text properties | |
| static char | underon [5] = {27, '[', '4', 'm', '\0' } |
| underlines text | |
| static char | underoff [6] = {27, '[', '2', '4', 'm', '\0' } |
| underline off | |
| static char | fgblue [6] = {27, '[', '3', '4', 'm', '\0' } |
| blue text | |
| static char | fgcyan [6] = {27, '[', '3', '6', 'm', '\0' } |
| cyan text | |
| static char | fgred [6] = {27, '[', '3', '1', 'm', '\0' } |
| red text | |
| static char | fggreen [6] = {27, '[', '3', '2', 'm', '\0' } |
| green text | |
| static char | fgdef [6] = {27, '[', '3', '9', 'm', '\0' } |
| default text | |
| Protected Member Functions inherited from FGJSBBase | |
| void | Debug (int) |
| Static Protected Member Functions inherited from FGJSBBase | |
| static std::string | CreateIndexedPropertyName (const std::string &Property, int index) |
| Protected Attributes inherited from FGThruster | |
| int | EngineNum |
| double | GearRatio |
| std::string | Name |
| double | PowerRequired |
| double | ReverserAngle |
| double | Thrust |
| double | ThrustCoeff |
| eType | Type |
| Protected Attributes inherited from FGForce | |
| FGFDMExec * | fdmex |
| FGMatrix33 | mT |
| TransformType | ttype |
| FGColumnVector3 | vActingXYZn |
| FGColumnVector3 | vFn |
| FGColumnVector3 | vH |
| FGColumnVector3 | vMn |
| FGColumnVector3 | vOrient |
| FGColumnVector3 | vXYZn |
| Static Protected Attributes inherited from FGJSBBase | |
| static const double | degtorad = 0.017453292519943295769236907684886 |
| static const double | fpstokts = 1.0/ktstofps |
| static const double | fttom = 0.3048 |
| static int | gaussian_random_number_phase = 0 |
| static const double | hptoftlbssec = 550.0 |
| static const double | in3tom3 = 1.638706E-5 |
| static const double | inchtoft = 0.08333333 |
| static const double | inhgtopa = 3386.38 |
| static const std::string | JSBSim_version = "1.0 " __DATE__ " " __TIME__ |
| static const double | kgtolb = 2.20462 |
| static const double | kgtoslug = 0.06852168 |
| static const double | ktstofps = 1.68781 |
| static const double | lbtoslug = 1.0/slugtolb |
| static Message | localMsg |
| static const double | m3toft3 = 1.0/(fttom*fttom*fttom) |
| static double | Mair = 28.9645 |
| static unsigned int | messageId = 0 |
| static std::queue< Message > | Messages |
| static const std::string | needed_cfg_version = "2.0" |
| static const double | psftoinhg = 0.014138 |
| static const double | psftopa = 47.88 |
| static const double | radtodeg = 57.295779513082320876798154814105 |
| static double | Reng = 1716.56 |
| static double | Rstar = 1545.348 |
| static const double | SHRatio = 1.40 |
| static const double | slugtolb = 32.174049 |
Models a helicopter rotor.
Brief description and the symbol frequently found in the literature.
<diameter> - Rotor disk diameter (2x R).
<numblades> - Number of blades (b).
<gearratio> - Ratio of (engine rpm) / (rotor rpm), usually > 1.
<nominalrpm> - RPM at which the rotor usally operates.
<minrpm> - Lowest RPM used in the model, optional and defaults to 1.
<maxrpm> - Largest RPM used in the model, optional and defaults to 2 x nominalrpm.
<chord> - Blade chord, (c).
<liftcurveslope> - Slope of curve of section lift against section angle of attack,
per rad (a).
<twist> - Blade twist from root to tip, (theta_1).
<hingeoffset> - Rotor flapping-hinge offset (e).
<flappingmoment> - Flapping moment of inertia (I_b).
<massmoment> - Blade mass moment. Mass of a single blade times the blade's
cg-distance from the hub, optional.
<polarmoment> - Moment of inertia for the whole rotor disk, optional.
<inflowlag> - Rotor inflow time constant, sec. Smaller values yield to quicker
responses (typical values for main rotor: 0.1 - 0.2 s).
<tiplossfactor> - Tip-loss factor. The Blade fraction that produces lift.
Value usually ranges between 0.95 - 1.0, optional (B). <maxbrakepower> - Rotor brake, 20-30 hp should work for a mid size helicopter.
<gearloss> - Friction in gear, 0.2% to 3% of the engine power, optional (see notes).
<gearmoment> - Approximation for the moment of inertia of the gear (and engine),
defaults to 0.1 * polarmoment, optional.<controlmap> - Defines the control inputs used (see notes).
<ExternalRPM> - Links the rotor to another rotor, or an user controllable property.
Experimental properties
<groundeffectexp> - Exponent for ground effect approximation. Values usually range from 0.04
for large rotors to 0.1 for smaller ones. As a rule of thumb the effect
vanishes at a height 2-3 times the rotor diameter.
formula used: exp ( - groundeffectexp * (height+groundeffectshift) )
Omitting or setting to 0.0 disables the effect calculation.
<groundeffectshift> - Further adjustment of ground effect, approx. hub height or slightly above
(This lessens the influence of the ground effect).The behavior of the rotor is controlled/influenced by following inputs.
fdm property propulsion/engine[x]/collective-ctrl-rad. See below for tail rotor propulsion/engine[x]/lateral-ctrl-rad. propulsion/engine[x]/longitudinal-ctrl-rad. The tail rotor collective (aka antitorque, aka pedal) control input. Read from propulsion/engine[x]/antitorque-ctrl-rad or propulsion/engine[x]/tail-collective-ctrl-rad.
Providing <ExternalRPM> 0 </ExternalRPM> the tail rotor's RPM is linked to to the main (=first, =0) rotor, and specifing <controlmap> TAIL </controlmap> tells this rotor to read the collective input from propulsion/engine[1]/antitorque-ctrl-rad (The TAIL-map ignores lateral and longitudinal input). The rotor needs to be attached to a dummy engine, e.g. an 1HP electrical engine. A tandem rotor is setup analogous.
The 'sense' parameter from the thruster is interpreted as follows, sense=1 means counter clockwise rotation of the main rotor, as viewed from above. This is as a far as I know more popular than clockwise rotation, which is defined by setting sense to -1. Concerning coaxial designs - by setting 'sense' to zero, a Kamov-style rotor is modeled (i.e. the rotor produces no torque).
In order to keep the rotor/engine speed constant, use of a RPM-Governor system is encouraged (see examples).
In case the model requires the manual use of a clutch the <gearloss> property might need attention.
Turboprop: Here the default value might be a bit too small. Also it's advisable to adjust the power table for rpm values that are far beyond the nominal value.
The property propulsion/engine[x]/groundeffect-scale-norm allows fdm based scaling of the ground effect influence. For instance the effect vanishes at speeds above approx. 50kts, or one likes to land on a 'perforated' helipad.
Setting <ExternalRPM> -1 </ExternalRPM> the rotor's RPM is controlled by the propulsion/engine[x]/x-rpm-dict property. This feature can be useful when developing a FDM.
<dl>
<dt>/SH79/</dt><dd>Shaugnessy, J. D., Deaux, Thomas N., and Yenni, Kenneth R.,
"Development and Validation of a Piloted Simulation of a
Helicopter and External Sling Load", NASA TP-1285, 1979.</dd>
<dt>/BA41/</dt><dd>Bailey,F.J.,Jr., "A Simplified Theoretical Method of Determining
the Characteristics of a Lifting Rotor in Forward Flight", NACA Rep.716, 1941.</dd>
<dt>/AM50/</dt><dd>Amer, Kenneth B.,"Theory of Helicopter Damping in Pitch or Roll and a
Comparison With Flight Measurements", NACA TN-2136, 1950.</dd>
<dt>/TA77/</dt><dd>Talbot, Peter D., Corliss, Lloyd D., "A Mathematical Force and Moment
Model of a UH-1H Helicopter for Flight Dynamics Simulations", NASA TM-73,254, 1977.</dd>
<dt>/GE49/</dt><dd>Gessow, Alfred, Amer, Kenneth B. "An Introduction to the Physical
Aspects of Helicopter Stability", NACA TN-1982, 1949.</dd>
</dl>
@author Thomas Kreitler
@version $Id: FGRotor.h,v 1.17 2015/09/27 10:03:53 bcoconni Exp $
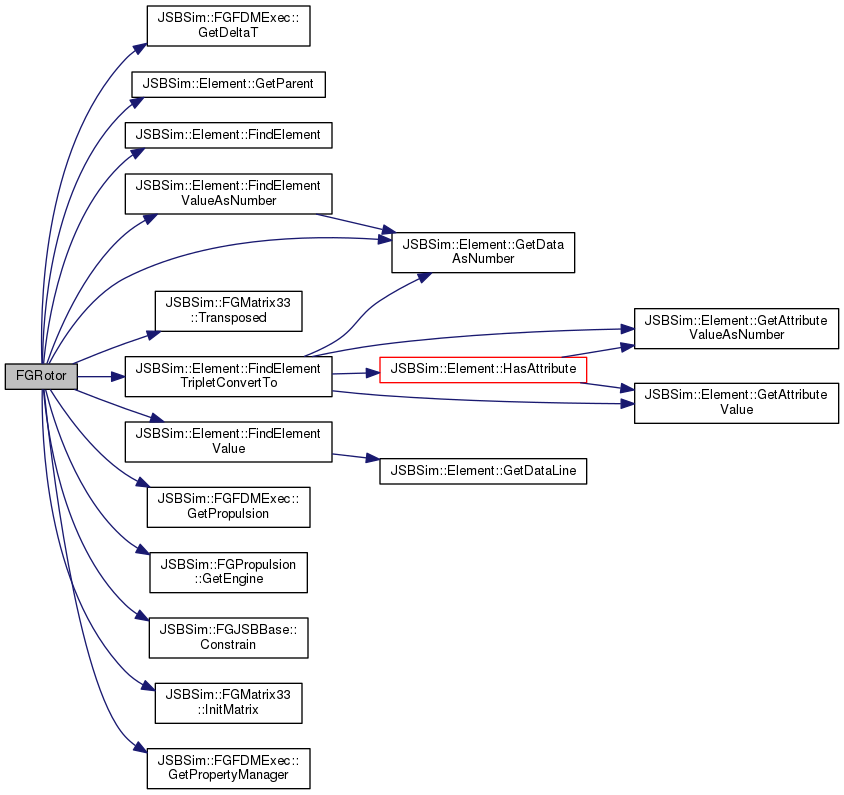
Constructor for FGRotor.
| exec | a pointer to the main executive object |
| rotor_element | a pointer to the thruster config file XML element |
| num | the number of this rotor |
Definition at line 77 of file FGRotor.cpp.
Here is the call graph for this function: 1.8.13
1.8.13