|
JSBSim Flight Dynamics Model
1.0 (02 March 2017)
An Open Source Flight Dynamics and Control Software Library in C++
|
|
JSBSim Flight Dynamics Model
1.0 (02 March 2017)
An Open Source Flight Dynamics and Control Software Library in C++
|
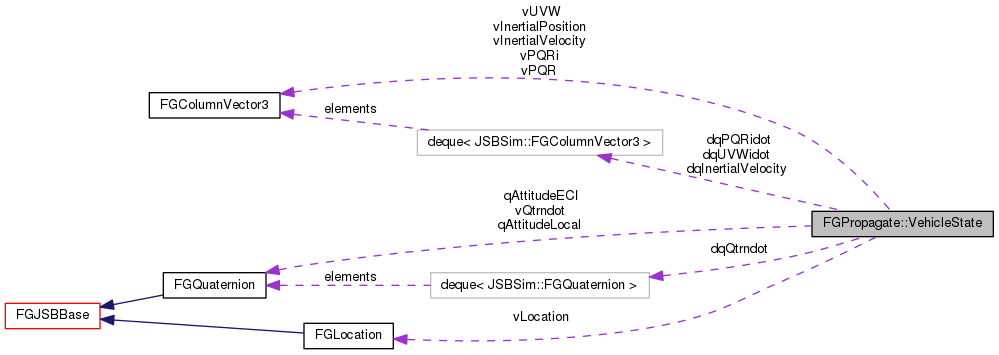
The current vehicle state vector structure contains the translational and angular position, and the translational and angular velocity. More...
#include <FGPropagate.h>
 Collaboration diagram for FGPropagate::VehicleState:
Collaboration diagram for FGPropagate::VehicleState:Public Attributes | |
| std::deque< FGColumnVector3 > | dqInertialVelocity |
| std::deque< FGColumnVector3 > | dqPQRidot |
| std::deque< FGQuaternion > | dqQtrndot |
| std::deque< FGColumnVector3 > | dqUVWidot |
| FGQuaternion | qAttitudeECI |
| The current orientation of the vehicle, that is, the orientation of the body frame relative to the inertial (ECI) frame. More... | |
| FGQuaternion | qAttitudeLocal |
| The current orientation of the vehicle, that is, the orientation of the body frame relative to the local, NED frame. More... | |
| FGColumnVector3 | vInertialPosition |
| FGColumnVector3 | vInertialVelocity |
| FGLocation | vLocation |
| Represents the current location of the vehicle in Earth centered Earth fixed (ECEF) frame. More... | |
| FGColumnVector3 | vPQR |
| The angular velocity vector for the vehicle relative to the ECEF frame, expressed in the body frame. More... | |
| FGColumnVector3 | vPQRi |
| The angular velocity vector for the vehicle body frame relative to the ECI frame, expressed in the body frame. More... | |
| FGQuaternion | vQtrndot |
| FGColumnVector3 | vUVW |
| The velocity vector of the vehicle with respect to the ECEF frame, expressed in the body system. More... | |
The current vehicle state vector structure contains the translational and angular position, and the translational and angular velocity.
Definition at line 107 of file FGPropagate.h.
| FGQuaternion qAttitudeECI |
The current orientation of the vehicle, that is, the orientation of the body frame relative to the inertial (ECI) frame.
Definition at line 134 of file FGPropagate.h.
| FGQuaternion qAttitudeLocal |
The current orientation of the vehicle, that is, the orientation of the body frame relative to the local, NED frame.
Definition at line 130 of file FGPropagate.h.
| FGLocation vLocation |
Represents the current location of the vehicle in Earth centered Earth fixed (ECEF) frame.
units ft
Definition at line 111 of file FGPropagate.h.
| FGColumnVector3 vPQR |
The angular velocity vector for the vehicle relative to the ECEF frame, expressed in the body frame.
units rad/sec
Definition at line 121 of file FGPropagate.h.
| FGColumnVector3 vPQRi |
The angular velocity vector for the vehicle body frame relative to the ECI frame, expressed in the body frame.
units rad/sec
Definition at line 126 of file FGPropagate.h.
| FGColumnVector3 vUVW |
The velocity vector of the vehicle with respect to the ECEF frame, expressed in the body system.
units ft/sec
Definition at line 116 of file FGPropagate.h.
 1.8.13
1.8.13